ईंधन और ऊर्जा प्रतिष्ठानों की सुरक्षा के लिए एक असममित खतरा
हाल के वर्षों में रूस के ईंधन-ऊर्जा परिसर तथा महत्वपूर्ण अवसंरचना के प्रतिष्ठान मानवरहित हवाई वाहनों के माध्यम से व्यवस्थित हमलों का शिकार होते रहे हैं। पारंपरिक वायु रक्षा एवं इलेक्ट्रॉनिक युद्ध साधन सस्ते UAV के बड़े पैमाने पर उपयोग के विरुद्ध प्रायः आर्थिक रूप से अप्रभावी सिद्ध होते हैं।
अवरोधन की मुख्य कठिनाई ड्रोन की कम दृश्यता, उनकी उच्च गतिशीलता और कम लागत में निहित है। युद्धाभ्यास करते FPV ड्रोन को छोटे हथियारों से मार गिराना पेशेवर निशानेबाजों के लिए भी अत्यंत कठिन कार्य है, जिसकी पुष्टि विशेष परीक्षणों से होती है।
हस्तचालित अवरोधन की सीमित प्रभावशीलता
व्यवहार में, निकट दूरी पर भी आग्नेयास्त्र से ड्रोन को मार गिराना एक गंभीर चुनौती है एक अनुभवी प्रतिस्पर्धी निशानेबाज के लिए भी .
* विश्व स्तरीय विशेषज्ञ द्वारा FPV ड्रोन के अवरोधन की कठिनाई का वीडियो प्रदर्शन।
खतरा उत्पन्न करने वाले UAV के प्रकार

UAV "Bober"
सामरिक टोही ड्रोन
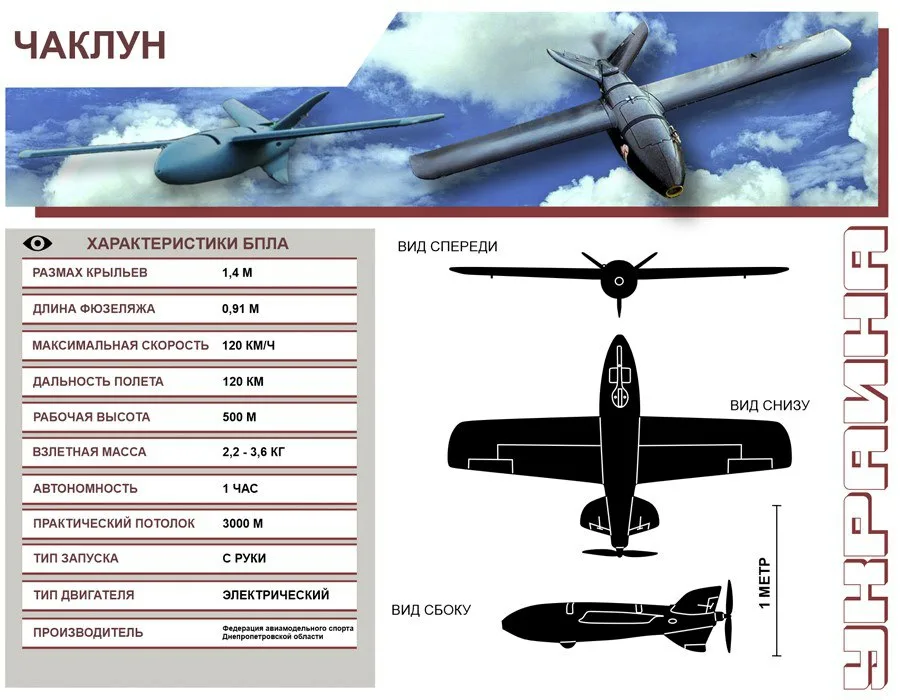
UAV "Chak"
कॉम्पैक्ट FPV ड्रोन
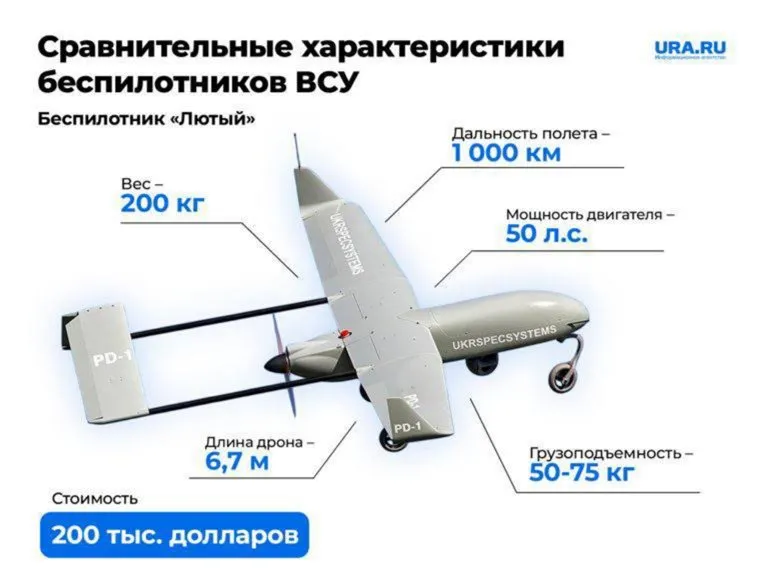
UAV "Lyuty"
लंबी दूरी का प्रहारक UAV
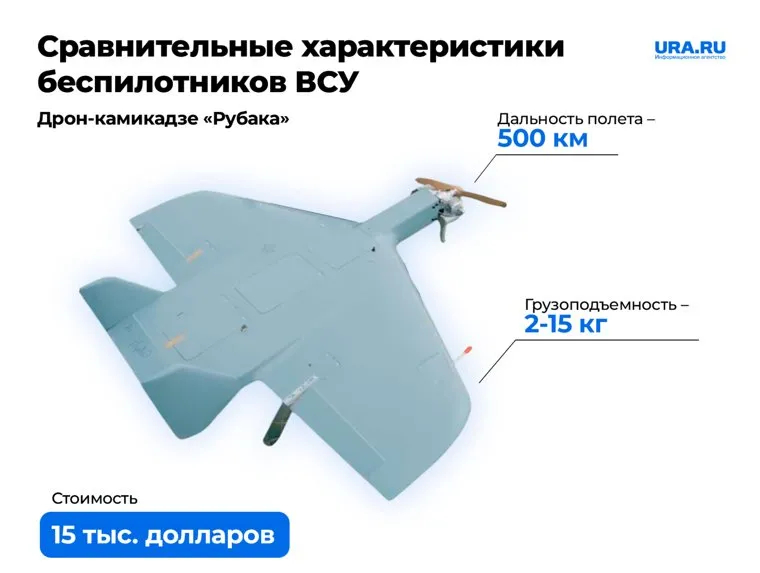
UAV "Rubaka"
आक्रमण ड्रोन

UAV "Furye"
टोही प्रणाली
खतरों की विविधता
विभिन्न श्रेणियों के 50 से अधिक प्रकार के UAV ईंधन और ऊर्जा प्रतिष्ठानों के लिए खतरा हैं
बड़ा करने के लिए छवि पर क्लिक करें
कम दृश्यता
कॉम्पैक्ट आकार और विशेष परत पारंपरिक साधनों से UAV का पता लगाना कठिन बना देते हैं
उच्च गतिशीलता
गति तथा प्रक्षेप-पथ को अचानक बदलने की क्षमता ड्रोन को कठिन लक्ष्य बना देती है
आर्थिक असममितता
हमलावर UAV की कम लागत पारंपरिक वायु रक्षा प्रणालियों के उपयोग को आर्थिक रूप से अलाभकर बना देती है